Goal:
Given three terrain obstacles, a 10" x 10" tunnel, a 10" wall, and an uneven terrain field, design a dynamic robot to clear all obstacles.
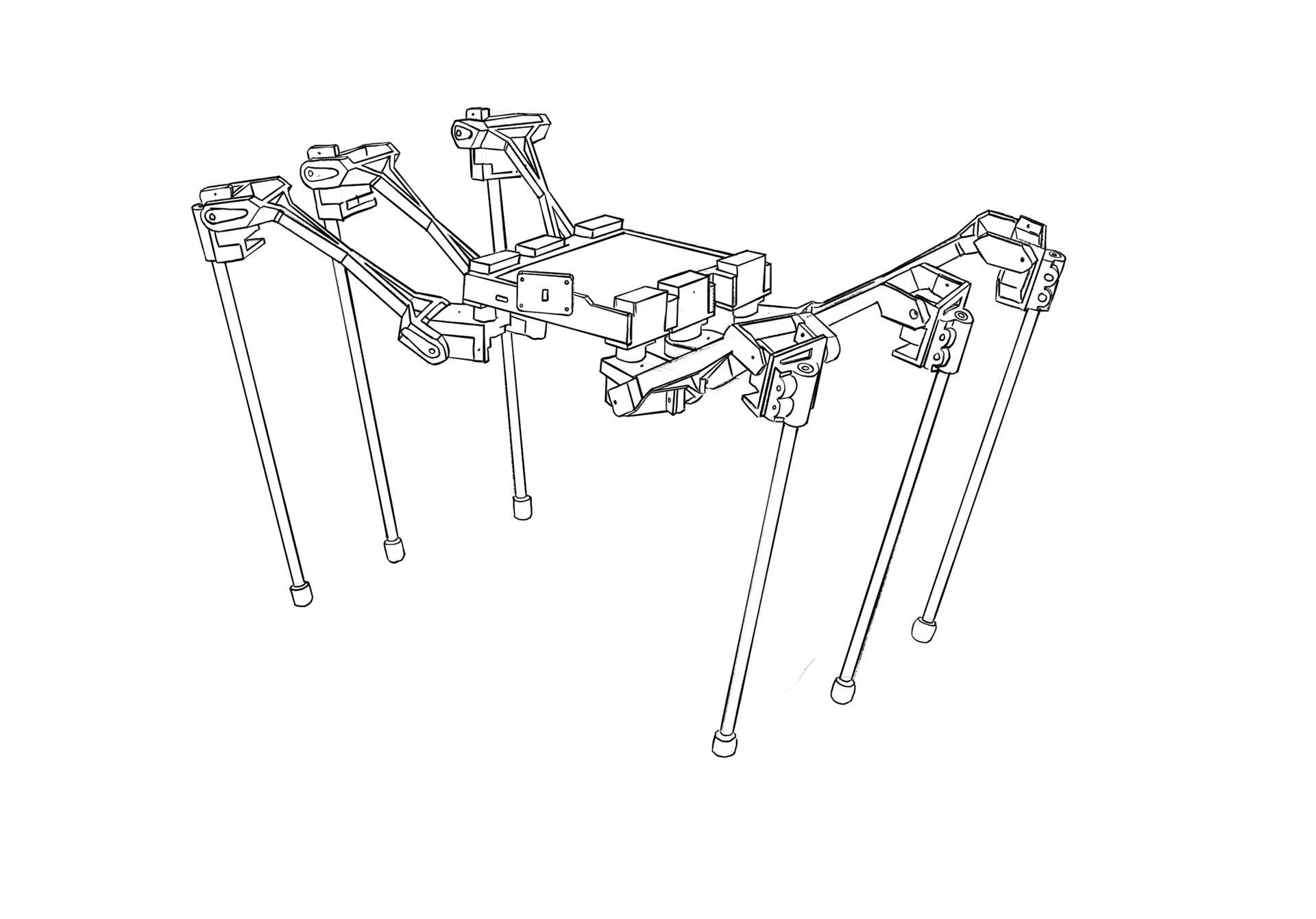
Approach:
Create a lightweight hexapod using carbon fiber tubes for the legs that can compress into a 10" x 10" cube and grow by extending its legs. Utilize sensor fusion of onboard IMU and angle feedback of legs to detect pose for dynamic adjustments. Use a TOF sensor mounted on servo to create simple LIDAR for autonomous operation within the tunnel.
Final Product:
The first video below demonstrates the gait of the robot, while the second video illustrates the robot tackling the obstacle course on game day.
Gait Demo:
Obstacle Demo:
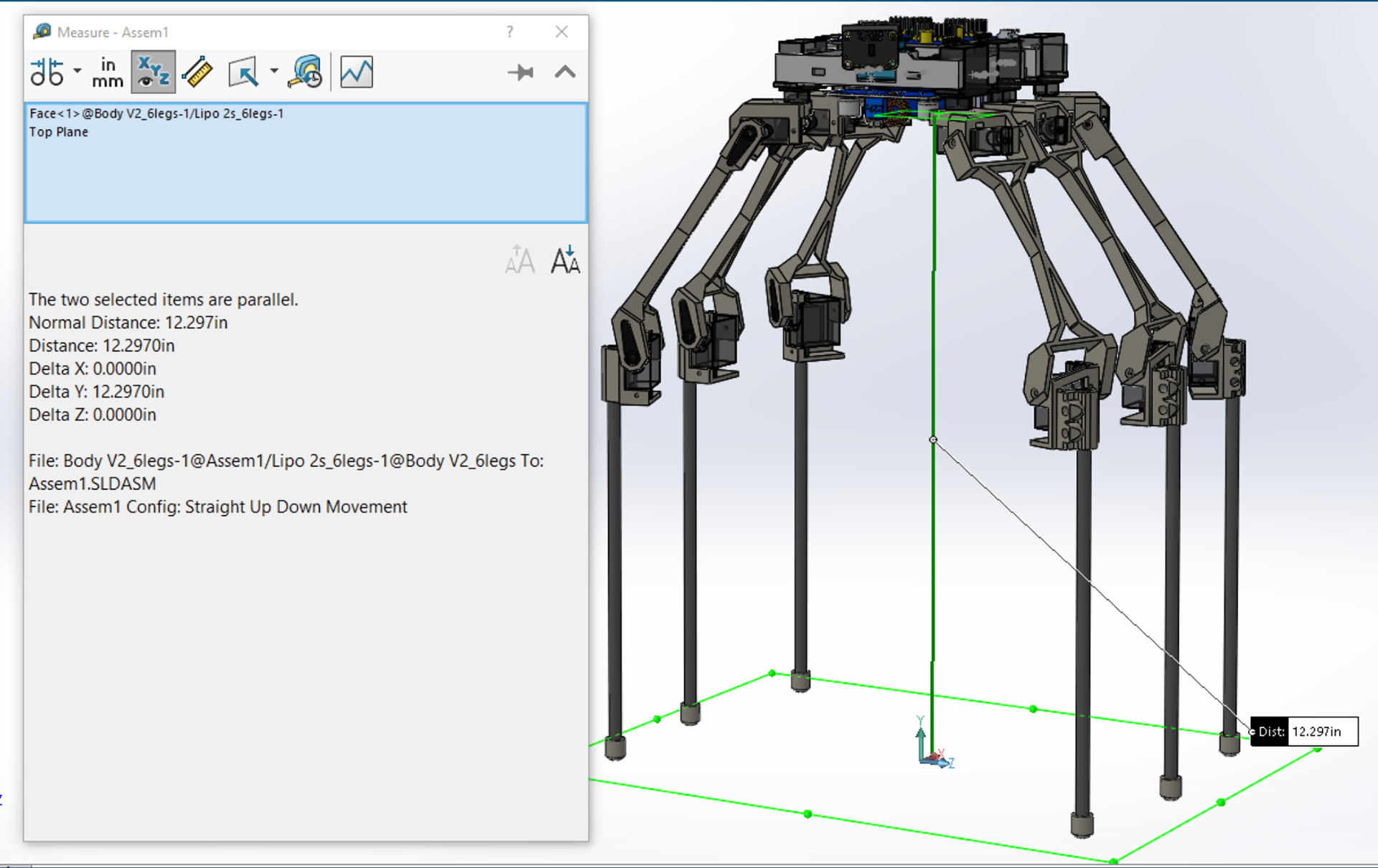
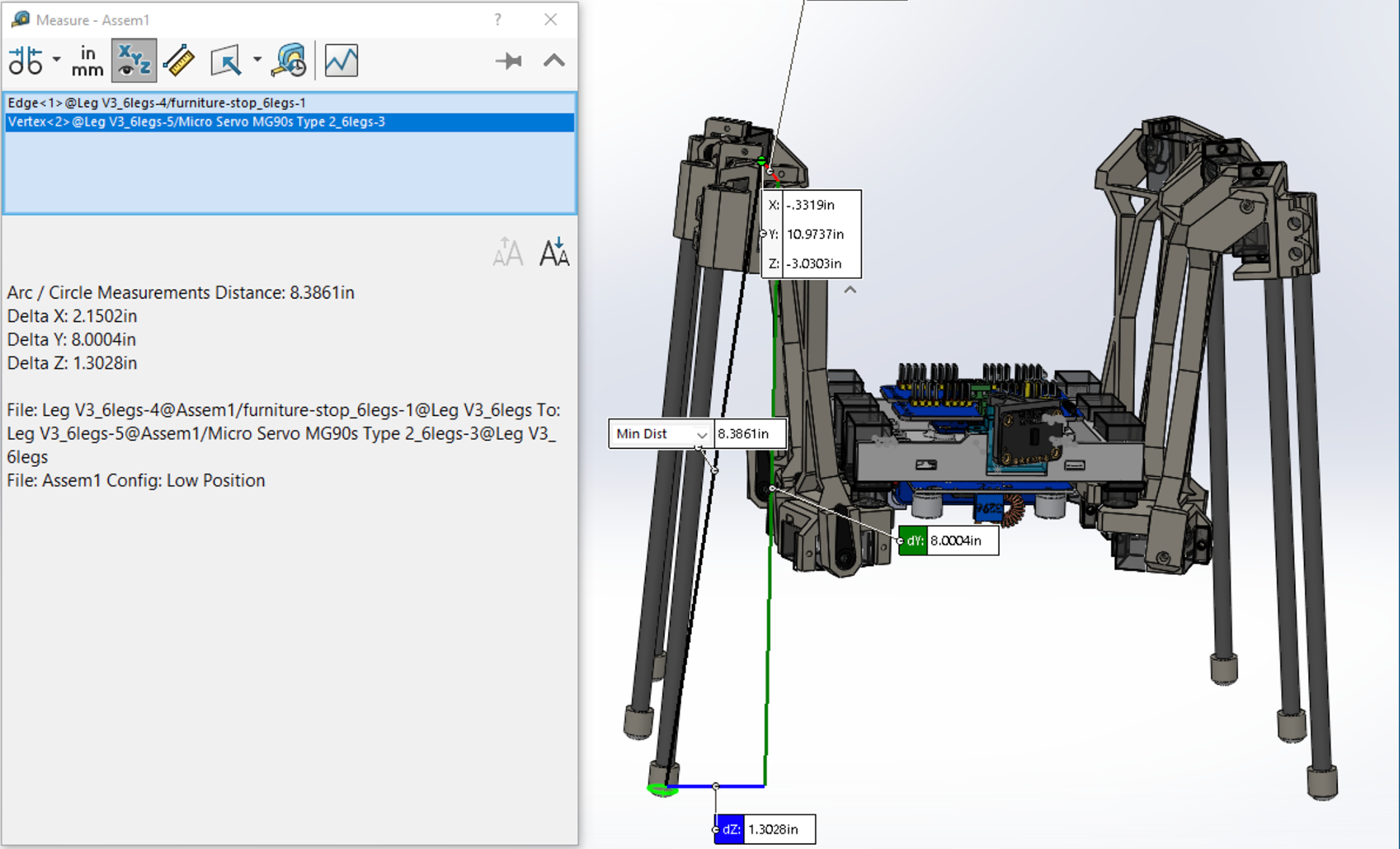
Size Constraints:
Planning and validation of final size of the hexapod was completed before fabrication in Solidworks.
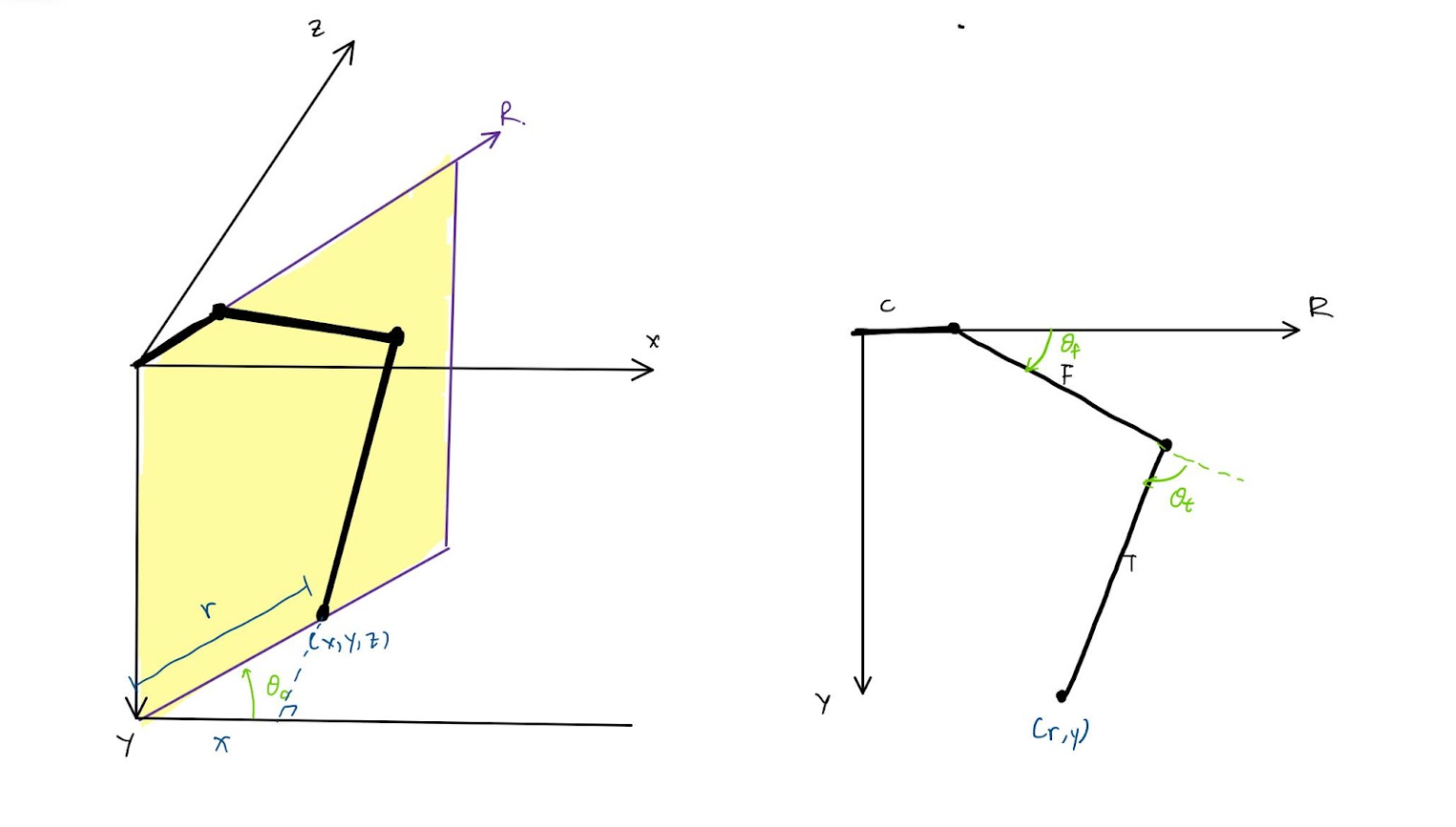
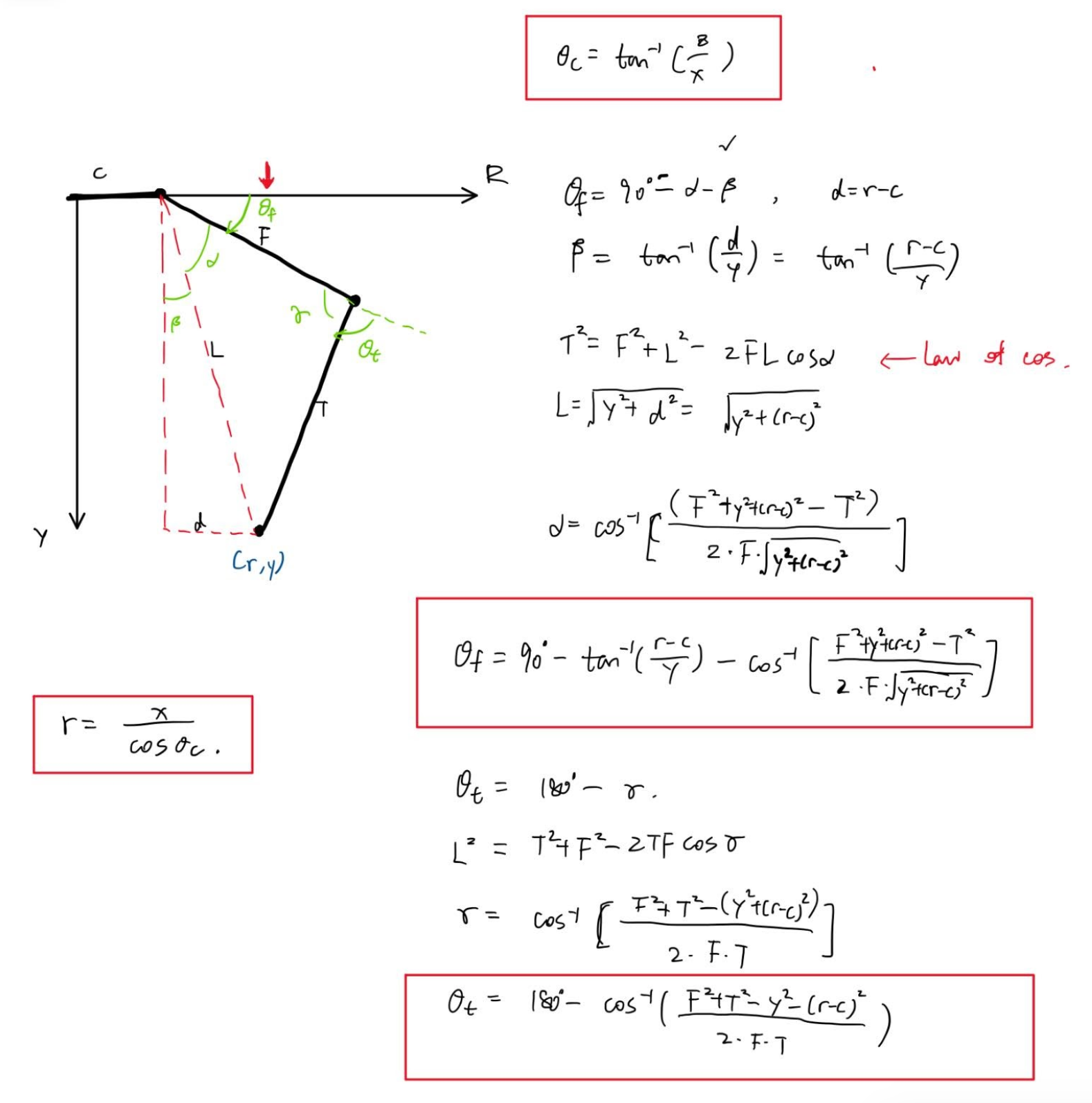
Inverse Kinematics:
The inverse kinematics for the legs are defined below. The final equations were implemented in Python.
Autonomous Motion Flow:
Outlined below is a high level overview of the control loop for autonomous sensor based motion

TOF Sensor Control
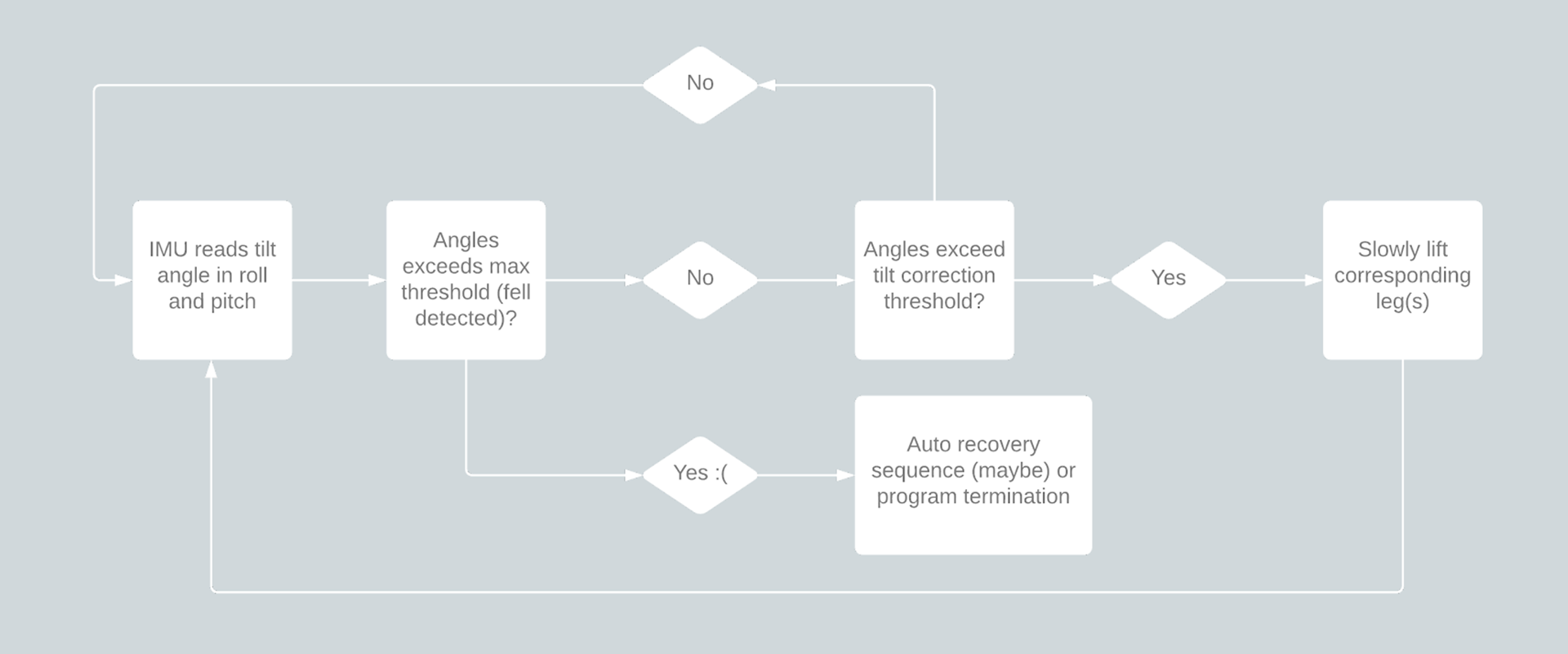
IMU Sensor Control
Manual Operation:
Utilized a Nintendo Switch JoyCon to drive the robot in manual mode. Using PyBlueZ we are able to read inputs off of the JoyCon and bind to actions of the hexapod