
This spring I participated in the Robotics in Education 2021 conference presenting my undergraduate research, "Developing an Introduction to ROS and Gazebo through the LEGO SPIKE Prime".
Abstract:
In an effort to teach controller design in the college class-room, we have built a toolbox connecting the LEGO SPIKE Prime robotic platform, Raspberry Pi 4, Onshape CAD environment, and ROS2/Gazebo. In this paper, we outline the exploratory process in connect-ing these platforms through the creation of a virtual machine package bundling all process dependencies and connections. This includes developing a library of LEGO pieces in Onshape and developing a Raspberry Pi image and a Linux VM for the laptop that can be shared across the class (all shared on Google Drive). We demonstrate the package in building a LEGO self-balancing robot and then using its ROS-controlled digital twin (drawn in Onshape) to tune the controller (PID) in the virtual world (Gazebo) and then successfully apply the controller to the LEGO robot.
Examples below illustrate the digital and physical builds along with the final physical build running controller gains generated using simulation.
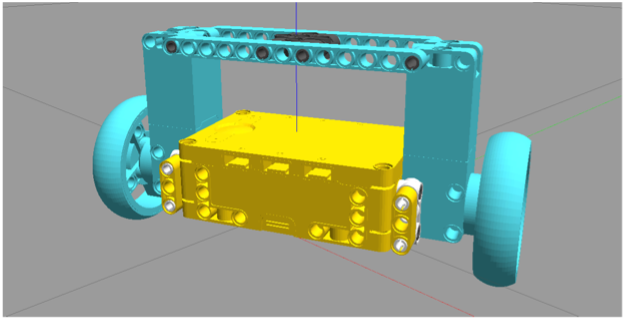
Digital twin simulation in Gazebo
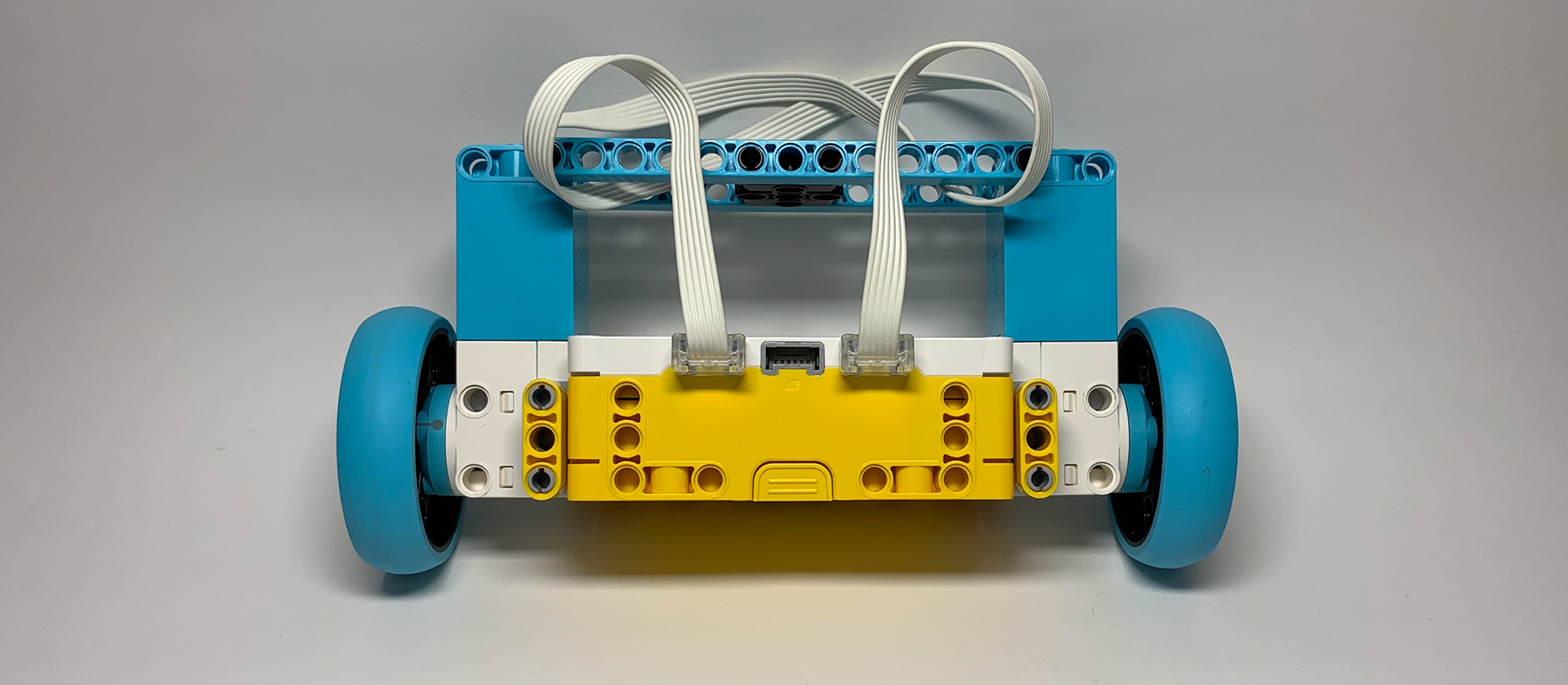
Physical build, one-to-one copy of the digital build
Self balancing demonstration using simulation generated PID gains